Cover image

3Cat-2 cubesat is a research project conducted at NanoSat Lab by the Technical University of Catalonia (UPC) aiming at testing novel GNSS-R techniques, acquiring data over different targets to derive algorithms to infer geophysical parameters and demonstrate the reliability of nanosatellites for Earth Observation missions. 3Cat-2 is a 6-U nanosatellite with dimensions 100 mm x 243,7 mm x 340.5mm and a total mass of 7.1 kg. 3Cat-2 was launched and put into a polar LEO orbit in August 15th, 2016 and remained active during three months.
3Cat-2 was developed as a technology demonstrator by researchers at the Technical University of Catalonia (UPC). The project had to main goals: acquire experience with cubesat technology and its challenges, and test novel GNSS-R software and on-board science instruments.
Novel software:
PYCARO GNSS-R main payload: PYCARO from P(Y) and C/A ReflectOmeter, is the main payload of 3Cat-2, based on the technology GNSS-R. GNSS-R is based on collecting the opportunity signals sent by the GPS, Galileo, Glonass and BeiDou constellations to perform reflectometry. The final goal of the scientific data of a GNSS-R mission is to perform altitude maps of the Earth, wind surface over the sea, deforestation…
FAPEC compression algorithm: The FAPEC is a compressions algorith by DAPCOM which is in charge of compressing the scientific data generated by the 3Cat-2 payloads. It was the first time this algorithm was used in a space mission.
Science instruments:
Mirabilis Star Tracker: The Mirabilis is an experimental star tracker developed by the NanoSat Lab. This star tracker, which is not included on the attitude determination algorithms, flies in the 3Cat-2 mission in order to be validated for future Nanosat Lab missions such as 3Cat-3.
IEEC AMR eLisa magnetometer: This magnetometer, developed by the Insitut d’Estudis Espacials de Catalunya (IEEC) will be included in the future ESA’s LISA mission and for this reason, it’s behavior will be analysed and validated during the 3Cat-2 mission.
I developed the software algorithms and conducted the verification and testing of all components of the Attitude Determination and Control System (ADCS) of the 3Cat-2.
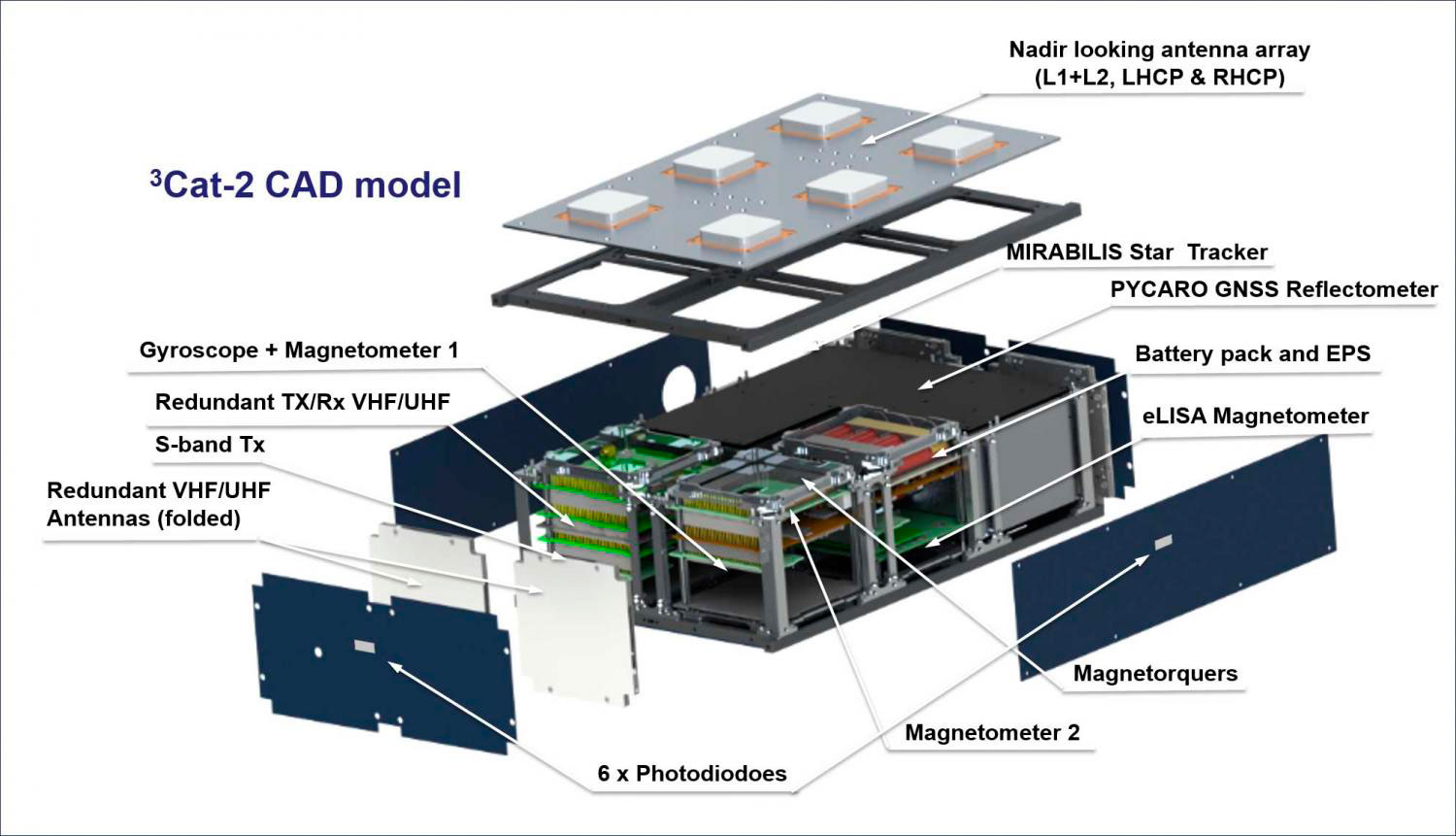
The attitude determination and Control System is responsible for orientating and stabilising the spacecraft towards a desired target attitude. In order to achieve this, a set of sensors and actuators were used to know the current orientation of the spacecraft, perform slew maneuvers, and counteract orbital disturbances.
On the one hand, the 3Cat-2 employed a set of three orthogonal magnetic torquers (0.24 Am2 each) as actuators. This type of actuation relies on controlling the spacecraft dynamics by generating a torque owing to the interaction between the Earth’s magnetic field and a local dipole moment from the magnetic torquers. On the other hand, the sensors were two 3-axis magnetometers (fine and coarse) to measure the Earth’s magnetic field, one 3-axis MEMS gyroscope to measure angular rates, and a set of six photodiodes mounted on each face of the nanosatellite to determine the Sun’s position. Additionally, an in-house, experimental star tracker was tested on orbit.
The ADCS algorithms and testing procedures are explained in detail in the following reference: 3Cat-2—Attitude Determination and Control System for a GNSS-R Earth Observation 6U CubeSat Mission.
Further information about the 3Cat-2 project can be found at: